Currently Empty: $0.00

The ultrasonic sensor is a device that measures distance by using sound waves beyond the human hearing range (greater than 20 kHz). It has two main components: a transmitter, which sends out a short burst of ultrasonic sound, and a receiver, which listens for the echo when that sound bounces back from an object. When the transmitter emits the pulse, it travels through the air until it hits an obstacle and reflects back toward the sensor. The receiver detects this returning echo, and the Arduino uses its internal clock to measure how much time passed between sending the pulse and receiving the echo. This time measurement is then stored in a variable and, using simple physics, converted into distance. Since the sound wave travels to the object and back, the measured time corresponds to twice the actual distance, so the final distance is calculated using the formula:
Distance =
Velocity of Sound × Time
2
The ultrasonic sensor and the object are placed facing each other

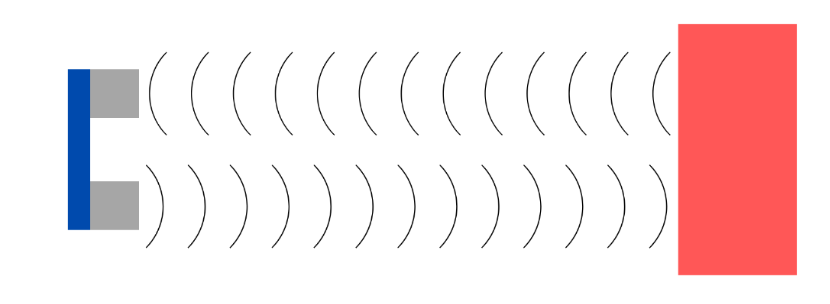
The sensor emits ultrasonic sound waves toward the object
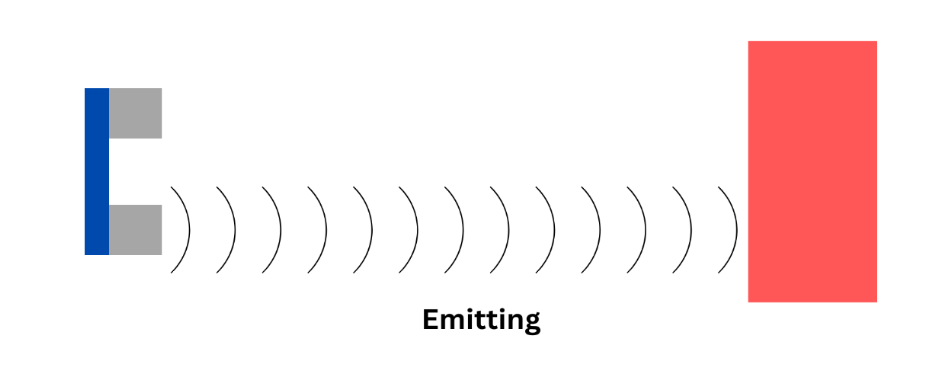
These sound waves bounce back as echoes after hitting the object
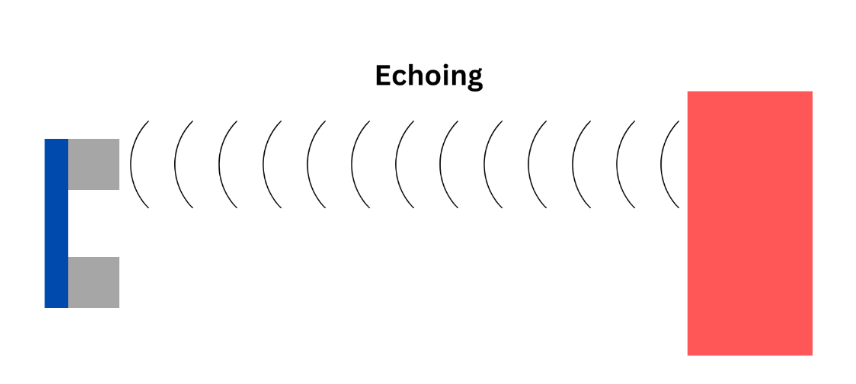
The sensor receives the echo and Arduino calculates the distance using the travel time

Alex Mohr
I really enjoyed this post. Very exciting article!! Lorem ipsum is dummy text used in laying out print, graphic or web designs.
Mark Alen
Grateful for your kind words! Thrilled to hear you found value in the insights. Your support means a lot. Thanks!
Hanna Ben
Inspiring education blog! Illuminating perspectives on effective teaching. Practical insights and innovative approaches make this a must-read for educators seeking impactful strategies. Bravo!